Alaluku 3.9
Robottiturvallisuus
Olemme koonneet alla tärkeimmät tiedot robottisovelluksesi turvallisuuskonseptista. Opi, miten voit estää pääsyn vaarallisiin paikkoihin, rajoittaa robotin liikkeitä ja varmistaa turvallisen ihmisen ja robotin välisen vuorovaikutuksen. Tutustu turva-aitojen ja edistyneiden tunnistusjärjestelmien merkitykseen sekä yhteistoimintatilojen suunnittelun tärkeyteen.
Robottiturvallisuutta koskevat standardit ja tärkeät säännöt
Robotit ovat erittäin joustavia ja niiden avulla voidaan luoda kustannustehokkaita automaatioratkaisuja. Samalla ne voivat kuitenkin aiheuttaa suuria riskejä.
Suuret, suurinopeuksiset robotit voivat aiheuttaa erittäin vakavia vammoja puristumisen ja törmäysten seurauksena. Siksi robottiturvallisuus on standardoitu kansainvälisesti standardien (EN) ISO 10218-1 ja -2 -standardien avulla. Yhdysvalloissa käytetään vastaavaa ANSI/RIA R15.06 -standardia. Liikkuville roboteille on olemassa myös ANSI/RIA R15.08 -standardi. Seuraavassa esitellään muutamia tärkeitä turvallisuussääntöjä.
Robottiturvallisuus perustuu kolmeen osaan:
Estä ihmisten pääsy vaaralliselle alueelle.
Rajoita robotin liikkeitä.
Varmista, että fyysinen kosketus on turvallista.
Kolmas osa, fyysisen kontaktin turvalliseksi tekeminen, on suhteellisen uusi käsite. Sitä kutsutaan usein yhteistoimivaksi robottikäytöksi. Se tarkoittaa, että erityisesti suunniteltu robottijärjestelmä ja käyttäjä työskentelevät samassa tai osittain päällekkäisissä työtiloissa. Ensin on suunniteltava yhteistyöalue ja haluttu vuorovaikutus ihmisen ja robotin välillä. Sen jälkeen tunnistetaan riskit ja otetaan käyttöön asianmukaiset suojatoimenpiteet.

Mikä on yhteistyörobottisovellus?
Viime vuosina teollisuudessa on herännyt suuri kiinnostus ”coboteihin”, joka on lyhenne englanninkielisestä sanasta ”collaborative robot”. Mielenkiintoista kyllä, robottivalmistajat eivät ole koskaan pitäneet tätä käsitettä erityisen arvossa, eikä sitä käytetä myöskään turvallisuusstandardeissa.
Termi ”cobot” liitetään usein siihen väärinkäsitykseen, että olisi olemassa jonkinlainen robotti, joka toimii turvallisesti lähes missä tahansa sovelluksessa ilman lisäsuojatoimenpiteitä. Tällaisia robotteja ei todellisuudessa ole olemassa.
Tämän väärinkäsityksen torjumiseksi kansainvälisten robottiturvallisuusstandardien (EN) ISO 10218-1 ja -2 uusissa versioissa käytetään termiä ”yhteistyöskentelevä sovellus”, mikä osoittaa, että kyseessä on muutakin kuin pelkkä erityinen robottityyppi. Standardit esittävät myös robottien luokittelun sekä selkeämmät vaatimukset riskinarvioinnille ja turvallisuustoimenpiteille, joita on toteutettava yhteistyösovelluksissa.
Yhteistyöhön tarkoitetussa sovelluksessa robotti voi olla suorassa vuorovaikutuksessa käyttäjien kanssa. Tähän voi kuulua fyysinen kosketus, jonka aikana robotti voi puristaa, tönäistä tai osua käyttäjään. Jotta tämä ei aiheuttaisi vammoja, robotin liikkumisnopeutta ja voimaa on rajoitettava.
(EN) Standardi ISO 10218-2:2025 sisältää nyt kuvauksen niin sanotusta kehomallista. Siinä määritellään voiman raja-arvot neliösenttimetriä kohti ja energian raja-arvot jouleina kehon eri osille. Pää, kasvot, silmät, korvat, kaula ja ohimot ovat erityisen alhaiset raja-arvot, koska ne ovat herkkiä iskuille.
Vaikka voima, nopeus ja iskuenergia ovat rajallisia, tartuntatyökalut, työkappaleet ja itse vuorovaikutus on analysoitava, jotta voidaan luoda todella turvallinen sovellus.

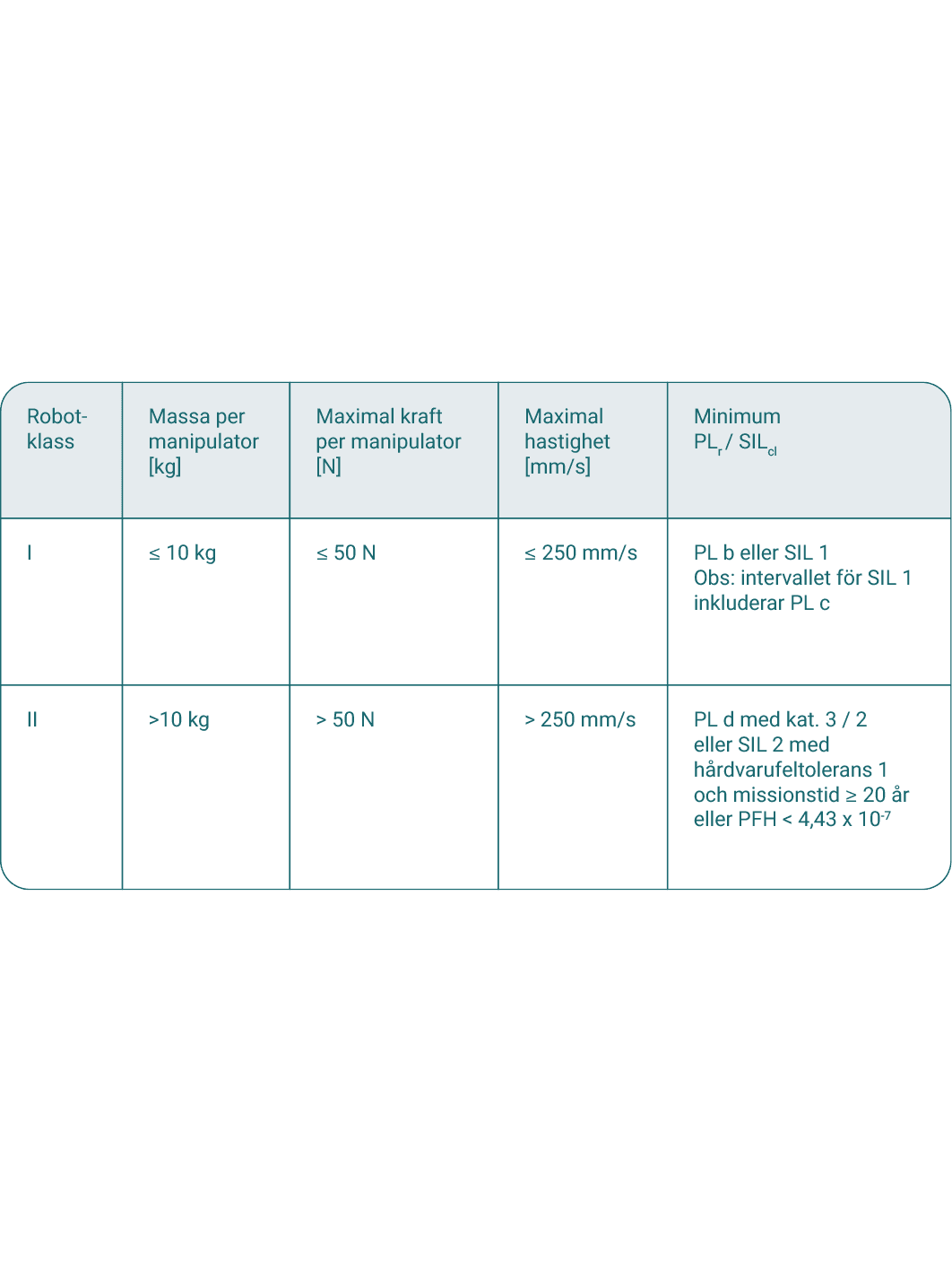
Robottiluokat
Teollisuusrobotit luokitellaan kahteen ryhmään: luokkiin I ja II. Luokan I teollisuusrobotit ovat pienikapasiteettisia, liikkuvat suhteellisen hitaasti ja niiden iskuvoima on vähäinen mahdollisen kosketuksen sattuessa. Tämän vuoksi ne soveltuvat työskentelemään ihmisten läheisyydessä.
Luokan I robottien on täytettävä tiukat painoa, voimaa ja enimmäisnopeutta koskevat rajoitukset. Kun ne täyttävät nämä vaatimukset, ohjausjärjestelmän turvatoimintojen on saavutettava vain PLr = b tai SIL 1, toisin kuin luokan II robottien tapauksessa, joissa vaaditaan PLr = d tai SIL 2.
Alhainen voima ja nopeus mahdollistavat robotin ja ihmisen välisen suoran kosketuksen. ”Väliaikainen” ja ”kvasi-staattinen kosketus” voivat aiheuttaa kipua, mutta eivät vahingoita käyttäjiä.
Voima ja nopeus eivät kuitenkaan ole ainoat riskin määrittävät tekijät. Robottiarmissa oleva ”tartuntalaite” eli työkalu on ratkaisevassa asemassa. Se voi olla terävä, teräväkärkinen tai kuuma. Laite voi ruiskuttaa, levittää tai injektoida myrkyllisiä aineita.
Turvallisuus yhteistoiminnallisilla työalueilla
Kun käyttäjä ja robotti jakavat saman työalueen, turvallisuuteen ei vaikuta pelkästään robotti. Se riippuu myös työkaluista, työkappaleista sekä tehtävistä, joita robotti ja ihminen suorittavat.
Monissa sovelluksissa on sekä yhteistoiminnallisia että ei-yhteistoiminnallisia työvaiheita. Osan prosessista robotti työskentelee itsenäisesti suuremmalla nopeudella ja voimalla. Sen jälkeen se voi lähestyä keräily- tai sijoitusasemaa, jossa työskentelee ihminen. Näiden työvaiheiden välinen siirtyminen voi aiheuttaa riskejä.
On olemassa kolme yleistä turvaominaisuutta:
HGC – Hand Guided Control eli käsiohjaus on yleisesti käytetty menetelmä robottien ohjelmoinnissa. Robotin liikkuvat osat ovat aktivoituina, mutta niitä voidaan siirtää manuaalisesti haluttuihin asentoihin, esimerkiksi poimintapisteeseen. Robotin ohjausjärjestelmä estää vaaralliset ja odottamattomat liikkeet.
SSM – Speed and separation monitoring (nopeuden ja etäisyyden valvonta) käyttää antureita, jotka havaitsevat, kun henkilö saapuu yhteistyöalueelle tai poistuu sieltä. Robotti hidastaa vauhtiaan ja/tai pysähtyy ajoissa. Kun henkilö on poistunut tai on turvallisella etäisyydellä liikkuvista osista, robotti jatkaa toimintaansa.
PFL – Pressure and force limiting (paineen ja voiman rajoitus): mahdollisen kosketuksen yhteydessä paine ja voima rajoitetaan. Tämä voidaan saavuttaa joko luokan I robotilla, joka on alusta alkaen heikompi ja hitaampi, tai elektronisten turvatoimintojen avulla.

Miksi yhteistyöhön tarkoitetuissa työtiloissa saatetaan tarvita aitoja tai esteitä
Järjestelmäsuunnittelijat kuvittelevat usein, että yhteistyöhön perustuva robottisovellus on rajaton ja ”aidaton”. Turvallisuusstandardit edellyttävät kuitenkin, että robottien kanssa tehtävälle yhteistyölle asetetaan selkeät rajat.
Suoja-aidat tai esteet voivat auttaa määrittelemään turvallisen alueen estämättä yhteistyötä.
Suoja-aita tai jalankulkijoiden este voi estää ihmisiä pääsemästä yhteistoimintatyöalueelle väärältä suunnalta. Se voi myös erottaa työalueen kulkuväylistä tai ajoväylistä.
Matala ”merkintäeste” voi kiinnittää ihmisten huomion siihen, että he ovat astumassa potentiaalisesti vaaralliselle alueelle.
Sekä aidat että esteet voivat edistää toiminnan tehokkuutta, sillä robotin ei tarvitse hidastaa vauhtia tai pysähtyä yhtä usein, kun ihmiset tulevat liian lähelle.

Yhteistyössä toimivien robottisovellusten riskinarviointi
Vaikka hidas ja vähävoimainen robotti käytettäisiin yhteistoiminnallisessa käyttöympäristössä, työtehtävät ja työvaiheet voivat aiheuttaa riskejä. Riskienarviointi on pakollista sovellettavien turvallisuusstandardien mukaisesti.
Noudata seuraavia vaiheita yhteistyöhön perustuvan robottisovelluksen riskinarvioinnissa:
Vaihe 1 – Määritä käsiteltävät työkohteet
Vaihe 2 – Valitse robotin käsivarteen asennettavat työkalut
Vaihe 3 – Määritä tarvittavat kiinteät laitteet ja muut koneet
Vaihe 4 – Määritä sekä robotin että käyttäjän työtehtävät
Vaihe 5 – Selvitä, kuinka paljon tilaa tarvitaan ja kuinka paljon tilaa on käytettävissä
Vaihe 6 – Tunnista riskit
Älä noudata sitä vakiomenetelmää, jossa ryhdytään välittömästi etsimään riskilähteitä. Yhteistyössä toimivien sovellusten riskit ovat monimutkainen yhdistelmä liikkuvia koneenosia ja ihmisten arvaamattomia käyttäytymismalleja. Ota huomioon tyypilliset käyttäytymismallit, kuten refleksit, yllättävät liikkeet, keskittymisen herpaantuminen, virhearvioinnit ja tietoiset poikkeamat ohjeista.
Kolmea turvallisuusperiaatetta tulisi aina noudattaa:
Älä luota (yksinomaan) robotin keveyteen, voimaan ja nopeuteen.
Estä mahdollisuuksien mukaan sekä tahallinen että tahaton kosketus robotin ja käyttäjien välillä.
Vältä robotin liikuttamista sellaisella korkeudella, jossa tarttuja tai muut työkalut voivat päästä lähelle käyttäjän päätä tai kasvoja.
Yhteistyössä toimivien robottisovellusten riskinarvioinnin yksityiskohtaisempi kuvaus löytyy standardista (EN) ISO 10218-2:2025, kohdista 4.3 ja 5.14.

Robottipohjainen keräily ja kuormalavaus
Robotteja käytetään yhä laajemmin tavaroiden ja pakettien keräilyyn ja sijoittamiseen tilausten käsittelyssä.
Lavoitus on jo pitkään ollut yleinen sovellusalue keskikokoisille ja suurille roboteille. Viime vuosina myös pienempiä robotteja on alettu käyttää yhteistyöhön perustuvissa keräily- ja sijoitussovelluksissa ”goods-to-person”-järjestelmissä. Nämä robotit voivat olla suorassa vuorovaikutuksessa ihmisten kanssa, koska ne liikkuvat pienellä nopeudella ja voimalla.
Robottipohjaisen tilausten keräilyn riskit ja asianmukaiset suojatoimenpiteet:
Kuljetusjärjestelmien ja pakkausasemien kanssa vuorovaikutuksessa olevat robotit voivat aiheuttaa puristumis- ja viiltovammojen vaaran. Myös tietyt robottityökalut voivat aiheuttaa riskejä.
Turvallisuustoimenpiteet: Vaikka loukkaantumisriski on pieni, voidaan asentaa matalia suojakaiteita pitämään ihmiset poissa tällaisilta riskialueilta.Ihmiset, jotka menevät tarpeettomasti yhteistoiminnalliseen työalueeseen, voivat loukkaantua odottamattomasta liikkeestä. He voivat myös saada robotin pysähtymään usein, mikä heikentää toiminnan tehokkuutta.
Turvallisuustoimenpiteet: Asenna matalat suojakaiteet, jalankulkijoiden suojakaide tai matalat merkintäesteet, jotta ihmiset tunnistavat alueet, joille heidän ei tule mennä, ja mistä suunnasta käyttäjien tulee päästä yhteistyöalueelle.

Teollisuusrobottien turvallisuus
Robottiturvallisuus riippuu suurelta osin suljetuista ”soluista”, joissa on suojakaiteet ja suojaluukut. Monissa sovelluksissa tarvitaan lisäksi valvontajärjestelmiä täydentämään turvallisuutta, ja joissakin tapauksissa ne voivat jopa korvata fyysisen ”robottikehikon”.
Kehittyneet tunnistusjärjestelmät:
Monissa robottisoluissa käytetään yhdistelmää, joka koostuu ovilla varustetuista suojakaiteista, valoverhoista ja turvalaseriskannereista.
Havaitsemisjärjestelmien edistynein muoto on 3D-kamera. Se on asennettava riittävän korkealle työpinnan yläpuolelle, jotta se ”näkee” kaikki alueet, joilla ihmiset voivat liikkua.
Ota huomioon, että henkilöitä voi olla edelleen vaara-alueella tunnistuslaitteiston takana. Mikäli mahdollista, saatetaan tarvita lisäsuojatoimenpiteitä.

Robottien turva-alueet
Suoja-aitaa voidaan käyttää suojatun alueen luomiseen, mutta sitä ei yleensä tule käyttää rajoituslaitteena, jolla määritellään robotin rajoitettu liikkumisalue tai pysäytetään robotin liike. Mikä on ero?
Turvallisuuden takaamiseksi robotin liikealue on rajoitettava niin sanotulle ”rajoitetulle liikealueelle”. Tämä voidaan toteuttaa mekaanisten rajoituslaitteiden avulla. Mekaaniset rajoituslaitteet ovat massiivisia lohkoja tai tappeja, jotka asennetaan robotin kiinnityslevyyn tai sen pääakseleiden nivelkohtiin.
Jotkut järjestelmäsuunnittelijat harkitsevat kuitenkin suojakaiteiden käyttöä mekaanisena rajoituslaitteena. Se ei ole sopiva ratkaisu. Kun suuri ja/tai nopea robotti törmää suojaverkkoon, verkko heiluu edestakaisin ja monissa tapauksissa vääntyy pysyvästi. Tämä voi aiheuttaa vaaraa robottisolun ulkopuolella oleville ihmisille.
(EN) Standardissa ISO 10218-2:2025, kohdassa 5.7.4.2, suositellaan voimakkaasti, ettei suojaverkkoa käytetä robotin pysäyttimena. ”Ulkoisia suojia ei saa käyttää rajoituslaitteina, jos robottisovellukset voivat aiheuttaa suojan vaarallisia muodonmuutoksia.”
Ulkoiset suojarakenteet, kuten suojakaiteet, on tarkoitettu pitämään ihmiset poissa. Niitä ei ole tarkoitettu pitämään robottia sisällä.
Robotin liikkumisen rajoittamiseksi tulisi sen sijaan käyttää seuraavaa:
Robottivalmistajan toimittama turvallisuusluokiteltu laitteisto ja ohjelmisto liikkeen ohjaukseen.
Sähkömekaaniset rajakytkimet tai lähestymiskytkimet.
Robottivalmistajan kiinteät mekaaniset pysäyttimet (lohkot ja tapit)

”Robottiturvalliset” aidat – konsepti vai väärinkäsitys?
Monet ihmiset kysyvät ”robottiturvallisista” aidoista tai viittaavat valmistajien testituloksiin, joissa iskunkestävyys on 2000 joulea tai enemmän.
Robotin liikkumisalue riippuu sen koosta. Usein tämä ”maksimialue” on paljon suurempi kuin kyseessä olevaan toimintaan tarvitaan. Koska järjestelmäsuunnittelijat haluavat käyttää mahdollisimman vähän lattiapinta-alaa, robotti on ohjelmoitu pysymään paljon pienemmällä ”rajoitetulla alueella ”. Tämän ympärille sovellussuunnittelijan on luotava rajattu liikealue, josta robotti ei saa poistua. Tarkoituksena on, että robotilla on riittävästi tilaa hidastua ja pysähtyä.
Suoja-aidat ja muut suojalaitteet muodostavat ”suojatun alueen”, jonne ihmiset eivät saa mennä laitteen ollessa käynnissä. Suojatun alueen on oltava suurempi kuin rajoitettu alue. Vaikka vika sattuisi, robotti ei saa koskaan liikkua suojatun alueen ulkopuolelle.
Robottia ympäröi siis kolme aluetta, joiden koko kasvaa:
Toimintialue (A), jolla robotti suorittaa tehtävänsä
Rajoitettu liikkumisalue (B), jonka ulkopuolelle robotti ei saa liikkua.
Suojattu alue (D), jonne ihmiset eivät saa mennä ja johon robotti ei saa koskaan päästä
Kuinka suuri etäisyys tulisi suunnitella rajoitetun liikkumisalueen ja ulomman suojakaiteen välille? Lankaverkosta valmistetun suojakaiteen läpi on mahdollista työntää sormia verkon läpi. Jotta robotista ei aiheudu henkilövahinkoja, tarvitaan siksi vähintään 120 mm:n ylimääräinen turvaetäisyys (C) robottikennon sisällä robotin rajoitetun liikealueen ja suojakaiteen välillä.
Suoja-aitoja ei siis tarvitse suunnitella robottiturvallisiksi, koska niiden tarkoituksena ei ole pysäyttää robotin liikettä. Robotti tulee sen sijaan pysähtyä turvalliselle etäisyydelle aidasta, vaikka vika sattuisi ilmenemään.

Tämä infografiikka havainnollistaa, miten teollisuusrobottien turvaetäisyyksiä tulisi tarkastella kriittisesti. Opi, miksi suojaritilät ovat tärkeitä, miten onnettomuudet syntyvät ja milloin ritilät eivät välttämättä ole ainoa ratkaisu. Tutustu tärkeisiin seikkoihin, jotka on otettava huomioon ihmisten turvallisuuden varmistamiseksi robottien läheisyydessä.