Underkapitel 3.9
Robotsäkerhet
Vi har sammanfattat den viktigaste informationen om säkerhetskoncept för din robotapplikation nedan. Lär dig hur du förhindrar åtkomst till faror, begränsar robotens rörelse och säkerställer säker människa-robotinteraktion. Upptäck betydelsen av säkerhetsstängsel, avancerade detekteringssystem och vikten av att planera samverkande utrymmen.
Standarder och viktiga regler för robotsäkerhet
Robotar är mycket flexibla och kan skapa kostnadseffektiva automationslösningar. Samtidigt kan de innebära stora risker.
Stora, höghastighetsrobotar kan orsaka mycket allvarliga skador genom krossning och sammanstötning. Därför har robotsäkerhet standardiserats internationellt genom (EN) ISO 10218-1 och -2. I USA används den närliggande standarden ANSI/RIA R15.06. För mobila robotar finns även ANSI/RIA R15.08. Några viktiga säkerhetsregler presenteras nedan.
Robotsäkerhet bygger på tre delar:
Förhindra att människor får åtkomst till riskområdet.
Begränsa robotens rörelser.
Gör fysisk kontakt säker.
Den tredje delen, att göra fysisk kontakt säker, är ett relativt nytt koncept. Det kallas ofta för samverkande robotdrift. Det innebär att ett särskilt utformat robotsystem och en operatör arbetar i samma arbetsyta eller i överlappande arbetsytor. Först behöver samarbetsytan och den önskade interaktionen mellan människa och robot planeras. Därefter identifieras riskerna och rätt skyddsåtgärder införs.

Vad är en samverkande robotapplikation?
Under de senaste åren har ett stort intresse inom industrin spridit sig kring "cobots", en förkortning av det engelska ordet"collaborative robot". Intressant nog har begreppet aldrig varit särskilt uppskattat av robottillverkare och det används inte heller i säkerhetsstandarderna.
Termen "Cobot" kopplas ofta till den missuppfattningen att det finns en typ av robot som verkar säkert i nästan vilken applikation som helst utan ytterligare skyddsåtgärder. Sådana robotar finns inte i verkligheten.
För att motverka den missuppfattningen använder de nya versionerna av de internationella robotsäkerhetsstandarderna (EN) ISO 10218-1 och -2 begreppet "samverkande applikation", vilket visar att det handlar om mer än bara en speciell typ av robot. Standarderna introducerar också en klassificering av robotar och tydligare krav för riskbedömning och säkerhetsåtgärder som ska vidtas i samverkande applikationer.
I en samverkande applikation kan roboten interagera direkt med operatörer. Detta kan inkludera fysisk kontakt under vilken roboten kan klämma, knuffa eller träffa operatören. För att säkerställa att detta inte resulterar i skador måste robotens rörelsehastighet och kraft begränsas.
(EN) ISO 10218-2:2025 innehåller nu en beskrivning av den så kallade kroppsmodellen. Den anger gränsvärden för kraft per kvadratcentimeter och energi i Joule för olika delar av kroppen. Huvud, ansikte, ögon, öron, hals och tinningar har särskilt låga gränsvärden eftersom de är känsliga för slag.
Även när kraft, hastighet och anslagsenergi är begränsade behöver gripverktyg, arbetsstycken och själva interaktionen analyseras för att skapa en verkligt säker applikation.

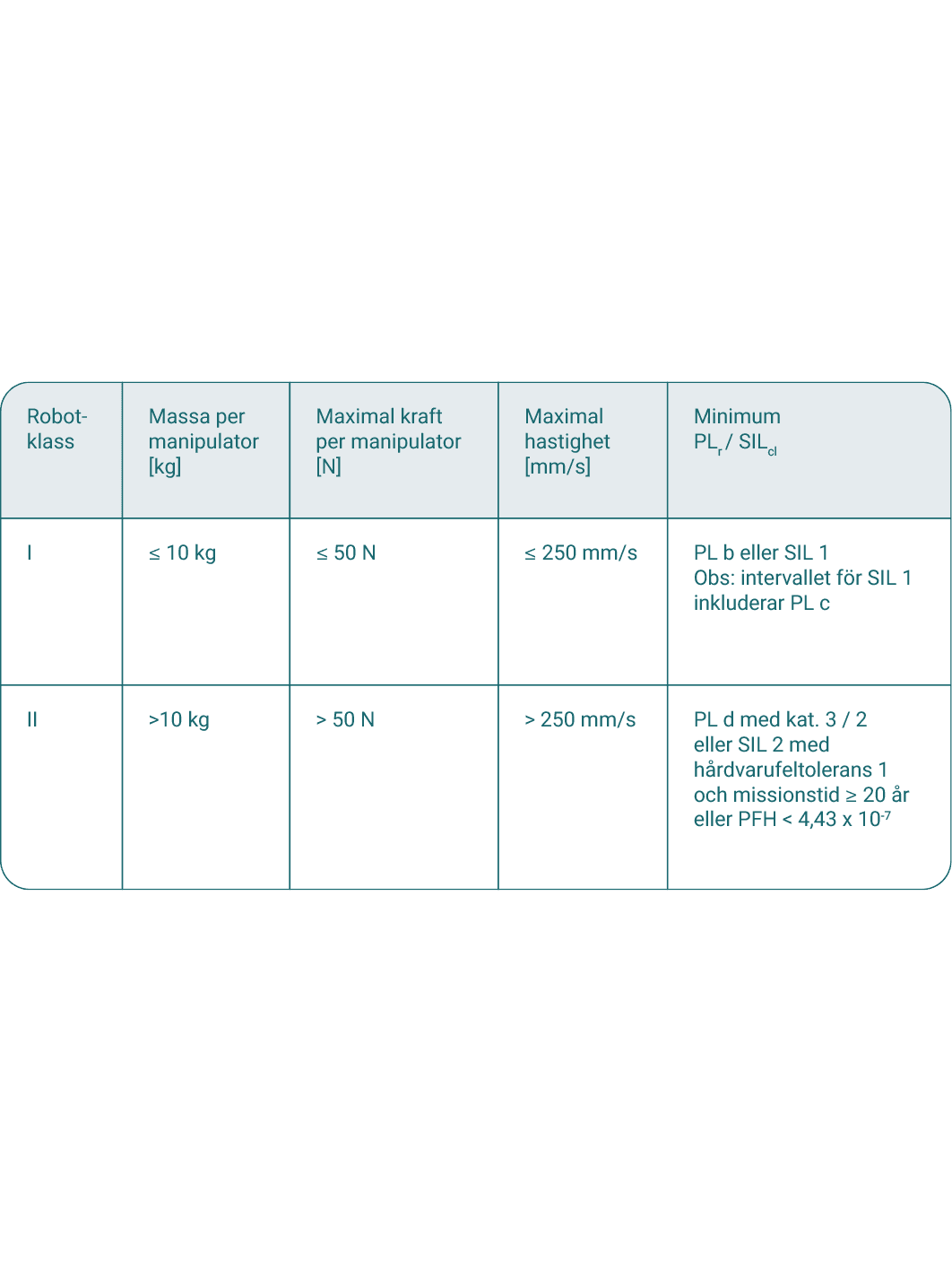
Robotklasser
Industrirobotar kategoriseras i två grupper, klass I och II. Klass I industrirobotar har låg lastkapacitet, rör sig relativt långsamt och har en låg kraft vid eventuell kontakt. Detta gör dem lämpliga att arbeta nära människor.
Klass I-robotar måste uppfylla strikta gränser gällande vikt, kraft och maximal hastighet. När de gör det behöver säkerhetsfunktionerna i styrsystemet endast uppnå PLr = b eller SIL 1, istället för PLr = d eller SIL 2 för klass II-robotar.
Den låga kraften och hastigheten gör det möjligt att tillåta direkt kontakt mellan robot och människa. "Transient" och "kvasi-statiskt kontakt" kan orsaka smärta men inte skada operatörer.
Men kraft och hastighet är inte de enda faktorerna som bestämmer risk. "Gripdonet" eller verktyget i robotens arm spelar en avgörande roll. Det kan vara spetsigt, vasst eller varmt. Applikationen kan spruta, applicera eller injicera giftiga material.
Säkerhet i samverkande arbetsområden
När en operatör och en robot delar samma arbetsområde avgörs säkerheten inte bara av roboten. Den beror också på verktygen, arbetsstyckena och de uppgifter som roboten och människan ska utföra.
I många tillämpningar finns det både samverkande och icke-samverkande arbetsmoment. Under en del av processen arbetar roboten självständigt med högre hastighet och kraft. Därefter kan den närma sig en plockstation eller placeringsstation där en person arbetar. Övergången mellan dessa moment kan innebära risker.
Det finns tre vanliga säkerhetsfunktioner:
HGC – Hand Guided Control, eller handstyrd kontroll används ofta när robotar ska programmeras. Robotens rörliga delar är aktiverade, men kan flyttas manuellt till önskade positioner, till exempel till en plockstation. Robotens styrsystem förhindrar farliga och oväntade rörelser.
SSM – Speed and seperation monitoring, använder sensorer som känner av när en person går in i eller lämnar en samarbetsyta. Robotens hastighet sänks och/eller stannar i tid. Efter att personen har lämnat eller är på ett säkert avstånd från de rörliga delarna fortsätter roboten att arbeta.
PFL - Pressure and force limiting, tryck och kraft vid eventuell kontakt begränsas. Det kan uppnås genom en robot i klass I som från början är svagare och långsammare, eller genom elektroniska säkerhetsfunktioner.

Varför samverkande arbetsytor kan behöva stängsel eller barriärer
Systemkonstruktörer föreställer sig ofta en samverkande robotapplikation som saknar gränser och är "stängselös". Men säkerhetsstandarder kräver att tydliga gränser sätts för det kollaborativa arbetet med robotar.
Skyddsstängsel eller barriärer kan hjälpa till att definiera ett säkert område utan att hindra samarbetet.
En skyddsstängsel eller fotgängarbarriär kan förhindra att människor går in i samverkande arbetsyta från fel håll. Det kan också separera arbetsytan från gångstråk eller körvägar.
En låg "markeringsbarriär" kan uppmärksamma människor på att de går in i ett potentiellt farligt område.
Både stängsel och barriärer kan bidra till en mer effektiv drift, eftersom roboten inte behöver sakta ned eller stanna lika ofta till följd av att personer kommer för nära.

Riskbedömning av samverkande robotapplikationer
Även om en långsam robot med låg kraft används i en samverkande driftmiljö kan arbetsuppgifter och arbetsmoment innebära risker. Riskbedömning är obligatorisk enligt tillämpliga säkerhetsstandarder.
Följ dessa steg vid riskbedömning av en samverkande robotapplikation:
Steg 1 – Fastställ vilka arbetsobjekt som ska hanteras
Steg 2 – Välj verktygen i robotens arm
Steg 3 – Bestäm vilken stationär utrustning och annan maskiner som behövs
Steg 4 – Bestäm arbetsmomenten för både robot och operatör
Steg 5 – Ta reda på hur mycket utrymme som behövs och hur mycket som finns tillgängligt
Steg 6 – Identifiera riskerna
Följ inte den standardmetod som innebär att omedelbart börja leta efter riskkällor. Risker i samverkande applikationer är en komplex kombination av rörliga maskindelar och människors oförutsägbara beteenden. Ta hänsyn till typiska beteendemönster som reflexer, överraskande rörelser, distraktion, felbedömningar och medvetna avsteg från instruktioner.
Tre säkerhetsprinciper bör alltid följas:
Förlita dig inte (enbart) på robotens låga vikt, kraft och hastighet.
I den mån det är möjligt, förhindra både avsiktlig och oavsiktlig kontakt mellan roboten och operatörerna.
Undvik att låta roboten röra sig på en höjd där gripdon eller andra ändverktyg kan komma nära operatörens huvud eller ansikte.
För en mer detaljerad beskrivning av riskbedömning för samverkande robotapplikationer, se (EN) ISO 10218-2:2025 avsnitt 4.3 och 5.14.

Robotiserad plockning och palletering
Roboter används i allt större utsträckning för att plocka och placera gods och paket vid orderhantering.
Palletering har länge varit en vanlig tillämpning för medelstora och stora robotar. På senare år har även mindre robotar börjat användas i samverkande plock och placeringsapplikationer inom goods-to-person system. Dessa robotar kan interagera direkt med människor eftersom de rör sig med låg hastighet och kraft.
Risker vid robotiserad orderplockning och lämpliga skyddsåtgärder:
Robotar som interagerar med transportsystem och packstationer kan medföra risk för krossnings- och skärskador. Vissa robotverktyg kan också utgöra risker.
Säkerhetsåtgärder: Även om skaderisken är låg kan låga skyddsstängsel installeras för att hålla människor borta från sådana riskområden.Människor som i onödan går in i en samverkande arbetsyta kan skadas av en oväntad rörelse. De kan också få roboten att stanna ofta, vilket stör driftens effektivitet.
Säkerhetsåtgärder: Installera låga skyddsstängsel, skyddsräcke för fotgängare eller lägre markeringsbarriärer för att uppmärksamma människor på områden de inte bör gå in i och från vilken sida operatörer ska ha åtkomst till den samverkande arbetsytan.

Säkerhet för industrirobotar
Robotarsäkerhet beror i stor utsträckning på stängda "celler" med skyddsstängsel och skyddsdörrar. I många applikationer behövs även övervakningssystem som komplement och i vissa fall kan de också ersätta den fysiska "robotburen".
Avancerade detekteringssystem:
I många robotceller används en kombination av skyddsstängsel med dörrar, ljusridåer och säkerhetslaserskannrar.
Den mest avancerade formen av detekteringssystem är en 3D-kamera. Den behöver installeras på en tillräcklig höjd över arbetsytan för att säkerställa att den "ser" alla områden där personer kan röra sig.
Var uppmärksam på risken att personer kan befinna sig kvar i riskzonen bakom detekteringsutrustningen. Om det är möjligt kan ytterligare skyddsåtgärder behövas.

Säkra zoner för robotar
Skyddsstängsel kan användas för att skapa ett skyddat område, men ska normalt inte användas som en begränsningsanordning för att definiera robotens begränsade rörelseområde eller för att stoppa robotens rörelse. Vad är skillnaden?
För att uppnå säkerhet måste en robots rörelseområde begränsas till ett så kallat “begränsat rörelseområde”. Det kan göras med hjälp av mekaniska begränsningsanordningar. Mekaniska begränsningsanordningar är massiva block eller stift som monteras på robotens monteringsplatta eller vid lederna av dess huvudaxlar.
Vissa systemkonstruktörer överväger dock att använda skyddsstängsel som mekanisk begränsningsanordning. Det är inte en lämplig lösning. När en stor och/eller snabb robot kolliderar med ett skyddsgaller kommer gallret att svänga fram och tillbaka och, i många fall, permanent deformeras. Detta kan leda till fara för människor utanför den robotiska cellen.
(EN) ISO 10218-2:2025, 5.7.4.2 avråder starkt från att använda skyddsgaller som en form av robotfångare. “Yttre skydd får inte användas som en begränsningsanordning när robotapplikationer kan orsaka riskfyllda deformationer av skyddet.”
Yttre skydd som skyddsstängsel, är avsedda att hålla människor ute. De är inte avsedda att hålla roboten inne.
För att begränsa robotens rörelse bör följande användas i stället:
Säkerhetsklassad hårdvara och mjukvara för rörelsestyrning från robottillverkaren.
Elektromekaniska gränslägesbrytare eller närhetsbrytare.
Fasta mekaniska stopp från robottillverkaren, (block och stift)

“Robotsäkra” stängsel – koncept eller missuppfattning?
Många människor frågar efter "robotsäkra" stängsel eller pekar på testresultat från tillverkare som visar slagmotsånd på 2000 joule eller mer.
En robots rörelsesområde beror på dess storlek. Ofta är detta “maximala utrymme ” mycket större än nödvändigt för den aktuella operationen. Eftersom systemdesigners vill använda så lite golvyta som möjligt, är roboten programmerad för att hålla sig till ett mycket mindre “begränsat utrymme ”. Runt detta behöver applikationskonstruktören skapa ett begränsat rörelseområde som roboten inte får kunna lämna. Syftet är att roboten ska ha tillräckligt med utrymme för att sakta ned och stanna.
Skyddsstängsel och andra skyddande enheter skapar ett “skyddat område” som människor inte får beträda under drift. Det skyddade området måste vara större än det begränsade området. Även om fel uppstår får roboten aldrig röra sig utanför det skyddade området.
Roboten omges därför av tre områden som ökar i storlek:
Arbetsområde (A), där roboten utför sitt arbete
Begränsat rörelseområde (B) som roboten inte får kunna röra sig utanför.
Skyddat område (D) som människor inte får gå in i och roboten aldrig får nå
Hur stort avstånd bör planeras mellan det begränsade rörelseområdet och det yttre skyddsstängslet? Skyddsstängsel av trådnät gör det möjligt att sticka in fingrar genom nätet. För att personer inte ska skadas av roboten krävs därför ett extra säkerhetsavstånd (C) på minst 120 mm inne i robotcellen, mellan robotens begränsade rörelseområde och skyddsstängslet.
kyddsstängsel behöver därför inte vara konstruerade för att vara robotsäkra, eftersom de inte är avsedda att stoppa robotens rörelse. Roboten ska i stället stanna på säkert avstånd från stängslet, även om fel uppstår.

Denna infographic illustrerar hur man tänker kritiskt kring säkerhetsavstånd för industrirobotar. Lär dig varför skyddsgaller är viktiga, hur olyckor uppstår och när galler kanske inte är den enda lösningen. Upptäck de viktiga övervägandena för att hålla människor säkra runt robotar.